无人机航磁测量技术研究现状与展望
在21世纪的前20年中,无人机技术不断成熟,无人机航磁测量技术在新型磁力仪研制应用、无人机平台开发、测量技术研究及试验应用等领域取得了诸多进展。无人机航空磁测也因其费用成本较低、部署灵活便捷、无人员伤亡风险、噪声水平低、数据采样密度大等技术优势,受到地球物理勘探公司的广泛关注。
国外自2000年起开展无人机航磁测量技术研究,加拿大等多国研发多款成熟系统并应用于矿产勘查。国内多家单位也陆续开展试验研究并取得进展,特别是2012年以来,核工业航测遥感中心研制多种航磁测量系统,掌握关键技术,推动该技术在多领域应用。
无人机航磁测量技术的发展和完善,特别是在新型磁力仪研制、无人机平台开发及其试验应用等方面的进展,对于精确快速地探测地下地质结构、提高资源勘查效率及减少环境影响具有重要意义。因此,探讨这一领域的最新研究动态,可以加深推动相关技术的创新发展,为未来的地球物理勘探提供更加高效的解决方案。
1 新型磁力仪研制应用
近年来,在传统磁通门磁力仪、质子磁力仪和光泵磁力仪的基础上,国内外开展了光泵磁力仪小型化研发工作,形成了系列产品,并研发了航空全张量测量系统和原子磁力仪,开展了航空磁测矢量测量和航空全张量磁力梯度测量试验。
1.1 光泵磁力仪的小型化
为适应无人机的搭载能力,光泵磁力仪进行了 小型化的改进,典型产品有加拿大Scintrex公司的 CS-VL 铯光泵磁传感器、加拿大RMS 公司的 AARC51 航磁数据采集器和国内加泰科公司的 GTK-R15 型铷光泵航磁测量系统。
(1)CS-VL铯光泵磁传感器
CS-VL高精度铯光泵磁力仪具有高灵敏度、低 噪声、自动半球选择、宽工作电压等特点。磁传感 器和电子单元重1.6 kg,较CS-3光泵磁力仪重量减 少了40%。与之配合使用的AARC51磁补偿器重量 约1.8 kg,两者结合更适于开展无人机航磁测量。
(2)GTK-R15 型铷光泵航磁测量系统
GTK-R15 型铷光泵航磁测量系统是采用微机 电(MEMS)技术开发的小型化高精度铷光泵磁力仪,磁传感器和电子单元重量仅0.12 kg,适用于轻 小型无人机测量平台。
1.2 航空全张量磁测系统
德国耶拿的物理学高技术研究院(英文缩写 IPHT)1997年开始研发航空全张量磁力仪梯度仪, 利用液氦冷却的薄膜技术制备低温超导量子干涉 仪(LTS-AQUID),2004年在南非用直升机和固定翼 飞机(Cessna 208)开展了全张量磁力梯度仪系统的 飞行试验,完成了1∶1万的测量工作,覆盖面积约 100 km2。IPHT将其全张量的航空低温SQUID磁梯 度测量系统称为 JESSY STAR,主要应用于油气、煤 层气、煤和地热的勘查,该系统优点是只需少量数 据,即可查明地下三维磁性体分布。美国TRISTAN TECHNOLOGIES公司研制了T877 SQUID高灵敏度 全张量磁力梯度仪,利用全张量排列可获得远处磁 偶极子的全部信息(包括偶极子大小和位置)。此 外澳大利亚联邦科学工业研究组织(CSIRO)研发了 可测量9 个地球磁场张量要素的高温超导磁力仪 HTS-SQUID系统,并开展了试验飞行。
2020年11月,自然资源部航空物探遥感中心牵头承担的国家重点研发计划项目“航空磁场测量技术系统研制”所属的两项课题“高温超导航磁全张量梯度测量系统”和“低温超导航磁全张量梯度测量系统”研究成果通过专家评审,是中国在全张量超导磁力仪领域取得的新进展。
1.3 原子磁力仪
2000年以来,国际上原子磁力仪(Atomic Magnetometers) 的研发工作十分活跃。原子磁力仪和 SQUID相比,不需要低温条件,灵敏度更高,例如无 自旋相互驰豫(Spin Exchange Relax ation Free, SERF)磁力仪,可以检测到5.0×10-7 nT的微弱磁场。
SERF)磁力仪,可以检测到5.0×10-7 nT的微弱磁场。 美国国家标准与技术研究院(NIST)技术团队 在2004年研制了最早的原子磁力仪,灵敏度为40 pT/√Hz,2009年提高到10 fT/√Hz。普林斯顿大学的 Romalis M 教授2004 年研制了无屏蔽条件下的 SERF原子磁力仪,在实验室环境下,灵敏度为1 pT/ √Hz。
俄罗斯的Boris Sterligov 和Sergei Cherkasov 通 过测量无人机磁源在静态和动态状态下的参数,进 行数学建模,对无人机磁源进行优化设计,显著降 低了无人机的磁干扰,有助于进行高质量的航磁测 量(Kosykh et al.,2018)。不同种类的磁力仪参数统 计见表1。

新型磁力仪的发展和应用,尤其是光泵磁力仪的小型化、航空全张量磁测系统的创新设计,以及原子磁力仪的研制进展,为无人机航磁测量技术注入了新的活力。光泵磁力仪通过小型化改进,不仅大幅降低了对无人机平台的载重要求,而且提高了测量的灵敏度和精确度,使得在复杂地质环境下的勘探作业更为高效和精准。航空全张量磁测测量系统的引入,拓宽了航磁数据的维度,为复杂地质结构的解析提供了更丰富的信息。原子磁力仪的应用,则是基于量子技术的飞跃,它的高精度和高稳定性使得远距离和深部地质勘探成为可能。这些技术的进步不仅推动了无人机航磁测量技术的发展,更为地球物理勘探领域带来了新的研究方法和应用前景。
2 不同载荷的无人机航磁测量系统研发
根据国务院国令第761 号《无人驾驶航空器飞 行管理暂行条例》,无人驾驶航空器按照性能指标 分为微型、轻型、小型、中型和大型。核工业航测遥 感中心基于不同载荷无人机开发了系列航磁测量 系统。
2.1 基于大中型无人机平台的航磁测量系统
2.1.1 CH-3 无人机航磁测量系统
CH-3 无人机(图1)翼展8 m、起飞重量达640 kg,有效载荷160 kg、作业飞行速度约200 km/h,具 备长航时、超低空、自主轮式起降和夜航等技术特 点。磁传感器集成在CH-3无人机翼尖部位的水滴 状探头舱内,具备全向位置调节功能,避免作业时 磁传感器失谐。CH-3无人机可在地面站控制下完 成磁补偿飞行。
2.1.2 Z-5B无人机航磁测量系统
Z-5B无人直升机(图2)起飞重量380 kg,有效 载荷50~80 kg,续航时间可达2~3 h,巡航速度小于120 km/h。磁传感器安装在无磁性探杆支架上,探 杆组件通过3点固定在起落架,并在机头任务舱下 添加辅助支撑。磁传感器安装位置距桨叶最前端 约3 m,尽量减少机体金属结构材料磁干扰的影响。

2.2 基于轻小型无人机平台的航磁测量系统
2.2.1 大疆M600Pro 无人机航磁测量系统
大疆M600Pro 无人机(图3)具有冗余飞控系 统,抗风险能力强,最大起飞重量15.5 kg,最大载荷 5.5 kg,最大抗风能力8 m/s,最大水平飞行速度65 km/h,作业飞行速度28.8~36.0 km/h,续航时间20 min。磁传感器支架采用碳纤维材料制作,沿无人 机前方向伸出,远离机身磁干扰场。
2.2.2 CW-15 垂起固定翼无人机航磁测量系统
CW-15 无人机(图4)为垂直起降固定翼无人 机,最大起飞重量16.5 kg,最大载荷3.0 kg,最大抗 风能力10 m/s,巡航速度18 m/s,续航时间160 min。 磁传感器支架采用碳纤维复合材料结构设计,同时 在无人机飞控程序中设置了磁补偿程序,具备自主 完成磁补偿飞行能力。
无人机航磁测量技术的发展已从依赖大中型无人机平台向轻小型无人机平台转变,标志着无人机技术在可携带性、灵活性和成本效益方面的显著进步。早期,大中型无人机因其较高的载荷能力和较长的续航时间,成为进行航磁测量的首选平台。然而,这些无人机的使用成本较高,且地面控制车体积较大导致作业区域受限。随着轻小型无人机技术的进步,特别是在电池续航力、稳定性控制技术及载荷能力方面的提升,使得轻小型无人机成为执行航磁测量任务的理想平台。轻小型无人机不仅降低了航磁测量的成本,还大幅提高了在复杂地形和低空飞行条件下数据采集的灵活性和效率。此外,高精度磁力仪和微型传感器技术的进步,进一步扩展了无人机航磁测量在地质勘探、环境监测等领域的应用范围。
3 应用实例
3.1 国外无人机航磁测量应用
2013年,加拿大的Stratus航空公司联合卡尔顿 大学开发了Venturer UAS系统,在加拿大阿尔伯塔 省南部开展了测量试验,系统搭载了铯光泵磁力仪 和差分GPS,平均飞行速度约90 km/h,平均飞行高 度约152.1 m,全程采取自主飞行模式。
俄罗斯维诺格拉多夫地球化学研究所开发了基于“heavyweight”多旋翼无人机的SibGIS-UAS 磁 测系统,搭载了俄罗斯MMPOS-1 磁力仪,2014— 2016年在东西伯利亚山区开展了大量的1∶10000~ 1∶1000比例尺的测量工作,获取了离地5 m高度的 测量数据,并和地面测量数据进行了对比,结果表 明地面测量数据与UAS测量数据相比没有明显的优势。
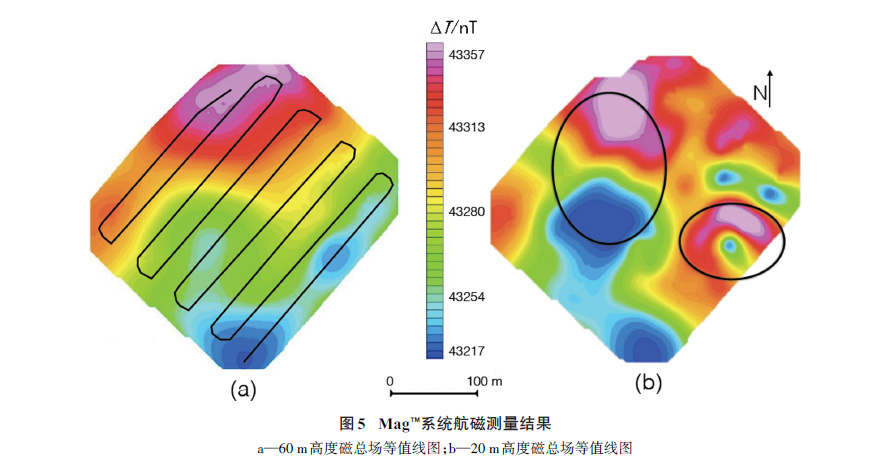
2016 年,加拿大的Kiyavash、Alexander 设计了 基于多旋翼无人机的Mag™系统,使用了GEM公司 的GSMP-35A钾光泵磁力仪,在矿区开展了高度分 别为20 m和60 m,测线间距为30 m的无人机航磁 测量(图5a中黑色线条为飞行航迹)。结果表明,在 20 m高度可以清晰查明磁异常细节,进而圈定矿床 位置(图5b中黑色圈为圈定的矿床位置),在60 m 高度磁异常细节不明显。无人机航磁测量系统通 过测量蛇绿岩超基性岩带的磁异常(图5),实现了 间接寻找铬铁矿。
2012—2019年,日本研制了基于无人直升机和 固定翼无人机的航磁系统,开展了火山监测和南极 科考工作。芬兰和瑞典开展了复杂地形地区旋翼 无人机航磁测量试验。加拿大开展了无人机三维 航磁测量,在安大略省北部等地区使用无人直升机 吊舱式航磁系统(Skydart)完成了测线飞行17000 km,用于圈定金矿成矿构造。
3.2 国内无人机航磁测量应用
3.2.1 基础地质和矿产勘查
2014年,中国地质科学院地球物理地球化学勘 查研究所在新疆克拉玛依地区完成无人机航磁测量 飞行约11600 km,平均飞行高度129.6 m,飞行速度在 180~200 km/h,航磁动态噪声优于0.08 nT的资料占 比超过96%,航磁总精度1.185 nT,根据航磁资料并 对测区内典型异常、线性构造、环形构造、隐伏岩体等进行了详细分析,结合测区地质和矿产资料,圈定了找矿有利区段(图6)。
2021—2022年核工业航测遥感中心使用Z-5B无人直升机在松辽盆地东部开展了无人直升机航磁测量试验,航磁动态噪声一、二级资料占99.27%。将无人直升机航磁测量数据与Y-12飞机在相同地区、相同比例尺、相同离地飞行高度的测量结果进行了对比,两种机型测量结果基本一致,且无人直升机测量由于采样点距小,反映的细节特征更为清晰(图7)。

3.2.2 工程勘查
2020年核工业航测遥感中心在山西某地区使 用大疆M600Pro旋翼无人机搭载铷光泵磁力仪开展 航测测量试验,航磁测量作业平均飞行高度126 m, 平均飞行速度34.1 km/h,航磁动态噪声优于0.08nT,一级资料占比为98.45%。
航磁资料清晰反映了区内不同磁性地质体的分布,包括岩体及控岩构造等,在此基础上推断了断裂分布,为后续勘查工作提供了依据。试验区航磁ΔT化极等值线平面图和航磁三维反演视磁化率断面图见图8、图9。

随着无人机技术的快速进步和磁力仪的精度的提高,无人机航磁测量不仅在基础地质、矿产勘查、工程勘查领域开展了应用,也在环境监测、考古发掘等多个领域展现出了广阔的应用前景。同时,随着三维数据处理反演技术的应用,无人机航磁数据的分析和解释能力大幅提高,为地质结构分析和资源评估提供了更为精确的信息支持。
3.3 存在的问题
随着无人机技术的不断成熟和磁力仪研发的升级换代,无人机航磁测量技术已经成熟,并在国内外得到推广应用。但是,在生产实践中,需要根据目标任务、仪器设备、地形气候等条件选择合适的无人机开展作业,不能一概而论。同时需要注意以下几个问题:
大中型无人机载荷大、续航时间长,适于开展大面积航磁测量工作,具有精度高、效率高的优势,但是存在保障复杂、人员多,费用偏高的不足。此外,无人机静磁改装和磁补偿可显著改善数据质量,但轻小型无人机,特别是旋翼无人机无法完成传统补偿动作,需进一步开展磁补偿研究工作;第三,无人机沿地形起伏飞行,需要获取与测量比例尺相当的地形数据,用于规划安全的测线飞行高度,同时,在崎岖地形开展大面积测量必须解决基于地形快速设计飞行航线的问题。
4 结论
无人机航磁测量技术在国内外已经得到广泛应用,国内外试验和生产工作经验表明:大中型无人机的航磁测量精度和数据质量已经与有人机相当,但作业成本还需要进一步降低;旋翼无人机等轻小型无人机在小面积、大比例尺、地形复杂地区有着显著的优势,相对于地面测量或有人机测量具有成本低效率高的特点。未来无人机航磁测量技术将越来越受到重视,技术水平和作业能力也将得到快速发展。同时也需要在以下方向进一步开展研究工作。
(1)考虑到飞机故障、仪器损毁等潜在风险,未来开发低成本、易维护、高可靠性的无人机航磁测量系统是大规模推广使用的先行条件。
(2)在复杂地形地区,旋翼无人机更适合开展精细化沿地形起伏航磁测量工作,需要进一步开展高精度磁传感器的研发工作,已适配旋翼无人机的载荷。
(3)受无人机结构和飞控系统限制,无人机不易完成常规有人机的航磁补偿动作,且磁探头一般距离机身更近,开展无人机航磁补偿技术研究,可进一步提高航磁测量精度。
(4)引入人工智能和机器学习技术,特别是在数据分析和反演过程中,预计将大幅提高处理海量航磁数据的能力,使得从数据中提取地质信息更加快速和准确。
